Week 1: Variable-Pitch Propulsion, Like Thrust Vectoring for Drones
March 1, 2024
Hey, it’s you again! Welcome back to my delivery drone development blog.
When I haven’t been building, I’ve been brainstorming names for this project. Deliverone, FlyDrop, SkyAge. Ehh, not great. What about Hüver? I like that.
I’m sure you’re wondering what else I’ve been doing besides coming up with names for the project. Well, I’ve been developing a test stand for my variable-pitch system for drone propulsion.
What is variable-pitch? It’s a system that is employed on many modern helicopters that allows the pilot to adjust the pitch angle of the propeller. When pitch angle is increased, each blade sweeps up more air and produces more lift. Think about it like a bicycle gear system. On a high gear, you have to pedal harder for each rotation but you travel further. For systems like this, there’s often an optimal cadence where certain gears are most efficient.
Applying this technology onto drones can revolutionize stability and maneuverability by speeding up reaction times for motor speed adjustments. On typical drones, the systems rely on the moment of inertia of the motor to slow down the motor. With a variable pitch system, we use an electronic servo to adjust the pitch of the propeller which results in fine adjustment capability that drastically outpaces the traditional acceleration and deceleration of motor rotation speed.
Watch this video from MIT for a better visual on variable-pitch effectiveness: https://youtu.be/Vy5Ky50eGJs?si=s_loo6c8umhMFFzm
Now, building the variable-pitch apparatus has been no easy feat.
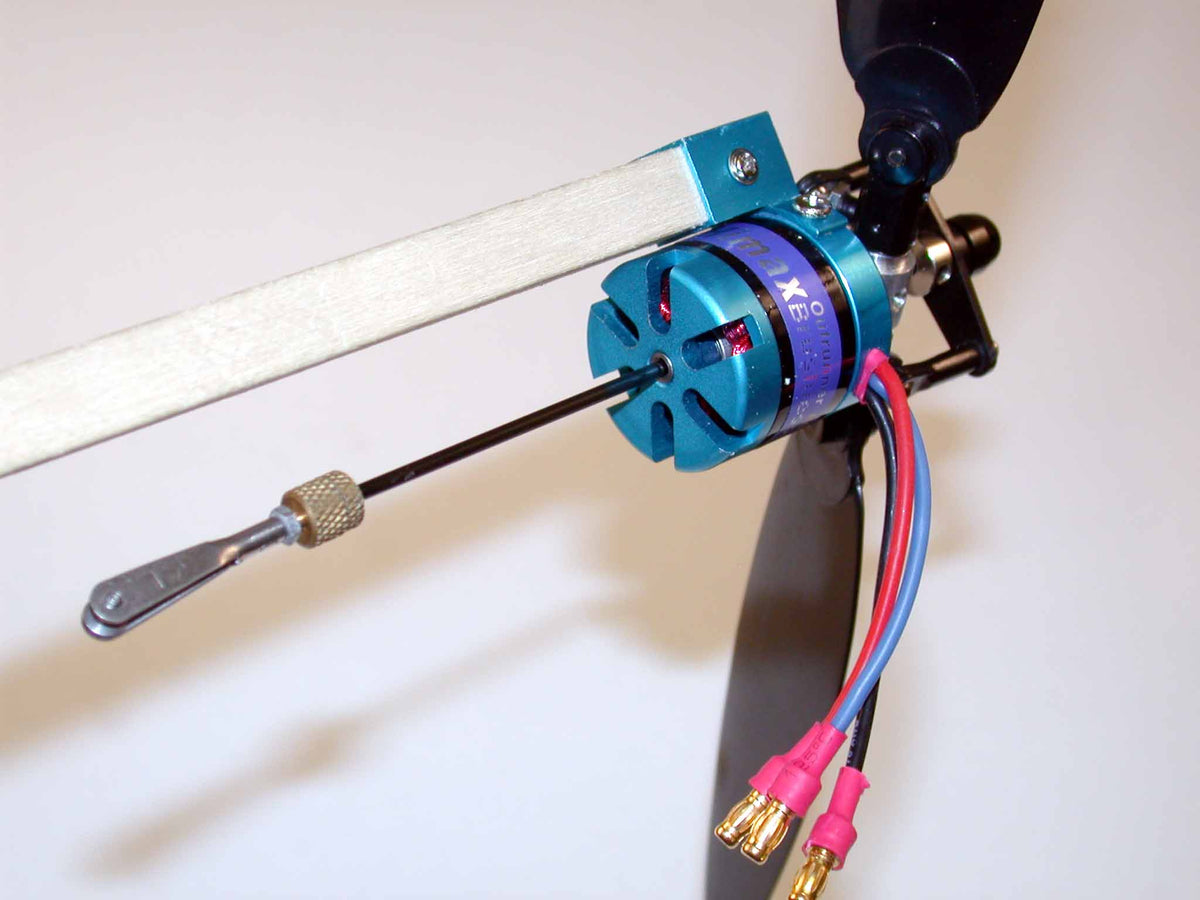
It requires an out-runner motor with a hollow shaft so that the long variable-pitch level can fit through the motor to be adjusted from under it. Here’s a picture of how the motor looks like after I replaced the solid shaft with a hollow one:
The pitch is adjusted through a linear actuation which pushes the thin shaft up and down to rotate the propellers with ball bearings. For demonstration purposes, I will be using a servo attached to a rack and pinion to push and pull for pitch adjustment. Here’s what that looks like:

Next, I put it all together. Using a long, 3D printed stand and a zip tie to attach the rack to the push-pull lever on the variable-pitch apparatus, it all successfully came together to create a servo driven variable-pitch propulsion prototype! (That’s quite the tongue-twister isn’t it?)
So… what comes next?
I’m having some trouble attaching the propeller to the motor, but that issue should be resolved shortly. Once that’s figured out, I’ll power everything on. The motor runs on an 11.1 V LiPo battery and the servo will connect to an Arduino board so that I can calibrate the pitch actuation. Once this works in tandem, I want to measure the change in thrust with various pitch angles while keeping the throttle constant by using a load cell. I’ll even measure the RPM using a laser tachometer to see how much the props slow down when sweeping more air (conservation of energy!). I’ll graph all of these quantities to give you a nice visual.
That’s all I have for you this week! Check back in next week for updates on Hüver. I’ll be starting work on a sustainable landing pad design so that the drone can easily locate the drop-off target.
Leave a Reply
You must be logged in to post a comment.