Week 8: Eyes and Hands
April 25, 2024
Eyes and hands? After looking at this blog’s title, I’m sure you’re wondering what that could possibly mean for my delivery drone project.
Well, Boomerang has been capable of flight for a few weeks now, but a delivery drone should be able to do so much more than that. It must be able to hold packages and detect landing spots!
This week I made significant progress in these departments. Starting with the “Eyes”, I’ve developed a tag recognition system that will be essential for Delivery Drone Dropoff Detection (DDDD). The system uses a HuskyLens AI Camera to perform DDDD. The benefits of the HuskyLens is that it can easily be trained to tags like the ones below:

With a press of a button, any of these tags can be saved and trained onto the platform. I’ve used Python on Raspberry Pi (a small computer) to interface with the HuskyLens so I can get precise data on when the tag has been detected and where in the field of vision of the camera it has been found. This way, down the line, I can send commands via MavLink to the Pixhawk flight controller and autonomously position the drone for precise dropoff.
The landing pad design is yet to be finalized, but it will be unique to each household and it will be made of an array of two tags like the ones above. The larger tag will be used for less precise adjustment, and the smaller tag will be used for precision landing adjustment once the camera’s field of vision narrows as the drone gets closer to the ground. I plan to make the landing pad customizable to best suit the user’s location. If the user wants dropoffs to be on the grass in their backyard, I will design a landing pad that is green and doesn’t stick out like a sore thumb for the end user.
Now, for the “Hands.” I’ve mulled over many designs and ideas for the payload dropoff mechanism on Boomerang. One thought I had was a winch/wind-up mechanism which entails having the package attached to a long string which will be unwound with a motor for dropoff. This design would weigh a lot and also cause great instability during flight when there is wind because the package will jostle around a significant amount. However, this design will be very safe because the propellers can be kept far away from children and pets at dropoff sites. Perhaps I’ll engineer this solution down the road.
The design I ended up choosing for the “Hands” was a simple claw grabber I designed with a 9g servo. It will look like this:
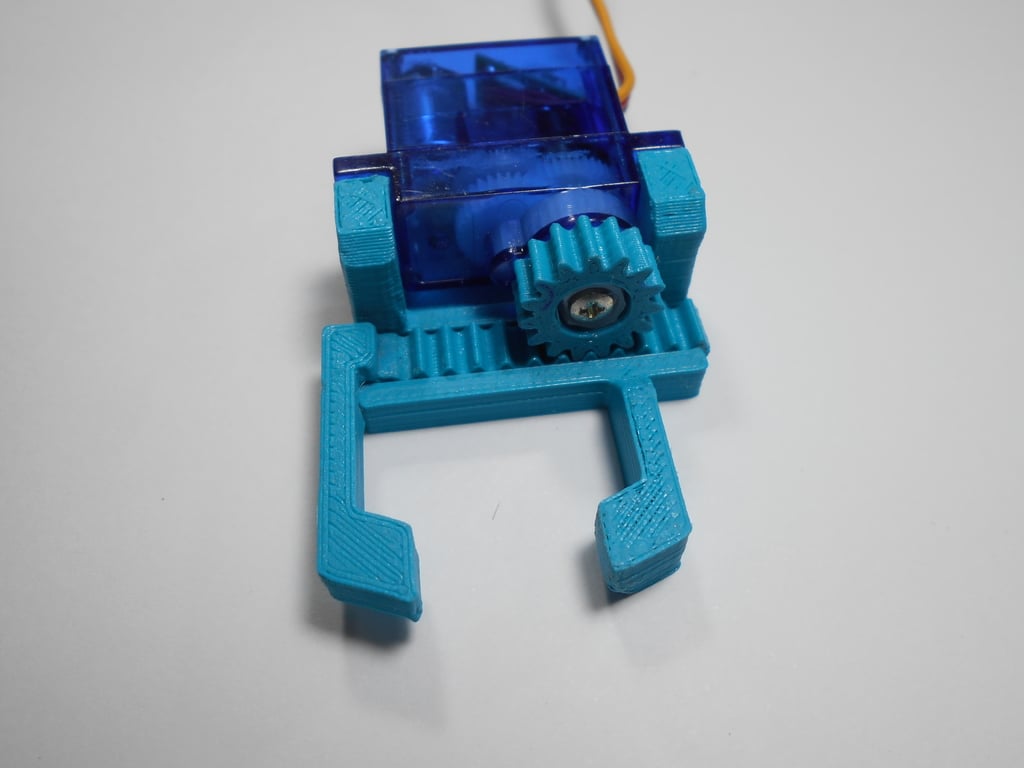
My 3D printer has been causing a lot of problems recently, so I’ve reached out to a friend for my printing needs which has delayed my process slightly. The claws will be mounted under the drone, and I plan to mount three or four claws underneath so that the drone can carry multiple packages. This creates a modular design which will allow the drone to fly to multiple destinations on one trip if it is carrying lightweight packages.
The next step is to assemble the claws and mount them to the drone. Then, I have to program them with the Raspberry Pi. I plan to use an ultrasonic sensor to detect when the drone is approaching the ground so that the computer can actuate the package dropoff mechanism at the right time. Fragile packages should be dropped close to the ground and others can be dropped off from the air.
Well, thanks for checking in again! As usual, I’ll see you next week.
Leave a Reply
You must be logged in to post a comment.